Summary of Arduino Timing Belt Calculator (console)
This article describes a Python command-line utility for calculating timing belt drive parameters, such as belt length in teeth or pulley center distance. It supports multiple belt systems (GT2, MXL, XL, L) and uses the `scipy` library for numerical solutions. The script allows users to input pulley tooth counts, center distances, or belt lengths to determine the missing variable, ensuring feasible mechanical designs.
Parts used in the Timing Belt Calculator:
- Python 3
- scipy library
- numpy library
- timing_belt_calculator.py script
- GT2 belt system parameters
- MXL belt system parameters
- XL belt system parameters
- L belt system parameters
This command-line Python script is a utility to help calculate parameters for timing belt drive systems. A more general discussion of designing with timing belts can be found on the Timing Belt Guide pages.
Installation Requirements
The code requires a working installation of Python 3 with scipy. For suggestions on setting up your system please see Python 3 Installation.
Examples
The script accepts parameters on the command line and chooses a calculation based on the specific combination of supplied values.
To see all the command-line options:
python3 timing_belt_calculator.py --help
To calculate the timing belt length for a 20 tooth GT2 pulley driving a 60 tooth GT2 pulley separated by 100 mm:
python3 timing_belt_calculator.py -N1 20 -N2 60 -C 100 Timing belt has 140.811669871759 teeth.
Note that this solution isn’t feasible, since endless belts must have an integer number of teeth selected from specific available sizes. To choose the correct separation for the available 140 tooth size:
python3 timing_belt_calculator.py -N1 20 -N2 60 -T 140 Pulley center distance is 99.181641 mm.
Full Code
Direct download: timing_belt_calculator.py
#!/usr/bin/env python3
import math, argparse
# Use the scipy library for numerical solutions.
# https://docs.scipy.org/doc/scipy/reference/optimize.html
import scipy.optimize
import numpy as np
#================================================================
# Each belt drive system is described by a set of properties. This allows the
# same code to work with different systems.
GT2 = { 'units' : 'mm',
'pitch' : 2.00,
'tooth_height' : 0.76,
'pitch_line_offset' : 0.25,
'belt_thickness' : 1.52,
}
MXL = { 'units' : 'inch',
'pitch' : 0.080,
'tooth_height' : 0.020,
'pitch_line_offset' : 0.010,
'belt_thickness' : 0.045,
}
XL = { 'units' : 'inch',
'pitch' : 0.200,
'tooth_height' : 0.050,
'pitch_line_offset' : 0.010,
'belt_thickness' : 0.090,
}
L = { 'units' : 'inch',
'pitch' : 0.375,
'tooth_height' : 0.075,
'pitch_line_offset' : 0.015,
'belt_thickness' : 0.140,
}
#================================================================
# Timing pulley center distance formulas.
# See section 22 in https://www.sdp-si.com/PDFS/Technical-Section-Timing.pdf
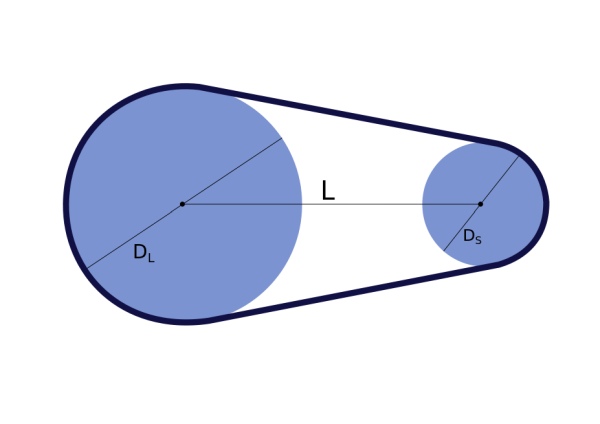
# Given:
# C center distance
# L belt length
# R1 larger pulley pitch radius
# R2 smaller pulley pitch radius
# phi One half angle of wrap on smaller pulley (radians)
# C * cos(phi) = R1 - R2
# 2 * C * sin(phi) = L - pi*(R1+R2) - (pi - 2*phi)*(R1-R2)
# Rewriting:
# phi = acos((R1 - R2) / C)
# L = 2 * C * sin(phi) + pi * (R1 + R2) + (pi - 2 * phi) * (R1 - R2)
def timing_belt_length(N1, N2, C, system=GT2):
"""Calculate the belt length in teeth for a pair of pulleys with N1 and N2 teeth
separated by center distance C. The result may be fractional and thus
unrealizable; endless belts have an integer number of teeth chosen from a
specific set of available sizes.
"""
# Make sure N1 >= N2:
if N2 > N1:
N1, N2 = N2, N1
# Look up belt properties.
pitch = system['pitch']
# Calculate the radius of each pulley in the system units. The circumference
# at the pitch diameter is the number of teeth multiplied by the belt tooth pitch.
R1 = N1 * pitch / (2 * math.pi)
R2 = N2 * pitch / (2 * math.pi)
# Check the pulley separation:
if R1 + R2 >= C:
print("Warning: pulleys collide, solution not feasible.")
# The essential calculation does not depend on units:
phi = math.acos((R1 - R2) / C)
L = 2 * C * math.sin(phi) + math.pi * (R1 + R2) + (math.pi - 2 * phi) * (R1 - R2)
# Convert the length to a tooth count (possibly non-integer).
belt_teeth = L / pitch
return belt_teeth
#================================================================
def timing_belt_center_distance(N1, N2, T, system=GT2):
"""Calculate the center to center distance for a pair of pulleys with N1 and N2
teeth driving a belt with T teeth.
"""
# Look up belt properties.
pitch = system['pitch']
# Use the scipy fmin algorithm to calculate an inverse solution using the
# length function. The initial guess is based on the pulley sizes.
x0 = np.array(((N1+N2) * pitch))
result = scipy.optimize.fmin(lambda x: abs(timing_belt_length(N1, N2, x[0]) - T), x0, disp=False)
return result[0]
#================================================================
def timing_pulley_dimensions(N, system=GT2):
"""Calculate properties for a timing pulley of a given size and system.
:param N: integer number of teeth
:param system: dictionary of belt system properties.
:return: dictionary of pulley properties
"""
# Look up belt properties.
pitch = system['pitch']
tooth_height = system['tooth_height']
# Calculate pulley properties.
# The pitch diameter is the effective diameter of the pulley acting as a
# wheel; it falls inside the belt, so outside the actual pulley.
pitch_diameter = N * pitch / math.pi
# The stock diameter is the maximum diameter of the pulley teeth,
# corresponding to the stock circular diameter before cutting grooves.
stock_diameter = pitch_diameter - tooth_height
return { 'teeth' : N,
'pitch_diameter' : pitch_diameter,
'stock_diameter' : stock_diameter
}
#================================================================
# Main script follows. This sequence is executed when the script is initiated from the command line.
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="Timing belt calculator.")
parser.add_argument('--debug', action='store_true', help='Enable debugging logging to console.')
parser.add_argument('-N1', type=int, help="Number of teeth on first pulley.")
parser.add_argument('-N2', type=int, help="Number of teeth on second pulley.")
parser.add_argument('-T', type=int, help="Number of teeth on timing belt.")
parser.add_argument('-C', type=float,help="Distance between pulley centers in default units.")
parser.add_argument('-sys', type=str, default='GT2', help="Belt system: GT2, MXL, XL, or L (default %(default)s).")
args = parser.parse_args()
system = {'GT2' : GT2, 'MXL' : MXL, 'XL' : XL, 'L' : L}.get(args.sys)
if system is None:
print("Warning: unrecognized belting system type, defaulting to GT2.")
system = GT2
# Choose a calculation depending on the combination of arguments.
if args.N1 is not None and args.N2 is not None and args.C is not None and args.T is None:
belt_teeth = timing_belt_length(args.N1, args.N2, args.C, system=system)
print(f"Timing belt has {belt_teeth} teeth.")
elif args.N1 is not None and args.N2 is not None and args.C is None and args.T is not None:
center_distance = timing_belt_center_distance(args.N1, args.N2, args.T, system=system)
print(f"Pulley center distance is %f %s." % (center_distance, system['units']))
else:
print("No calculation defined for this combination of arguments.")
Source: Arduino Timing Belt Calculator (console)
- What are the installation requirements for this script?
The code requires a working installation of Python 3 with scipy. - How do I view all available command-line options?
Run python3 timing_belt_calculator.py --help to see all options. - Can I calculate the timing belt length for specific pulleys?
Yes, use the -N1, -N2, and -C flags to calculate the number of teeth required. - Does the script support different belt systems like MXL or XL?
Yes, the script supports GT2, MXL, XL, and L belt systems via the -sys flag. - How can I find the correct separation for an integer tooth count?
Use the -T flag with specific pulley sizes to calculate the precise pulley center distance. - What happens if the calculated belt length is not an integer?
The solution may be unrealizable because endless belts must have an integer number of teeth from available sizes. - What is the default belt system used if none is specified?
The default belt system is GT2 if no other system type is selected. - How does the script handle pulley collisions?
If the sum of radii is greater than or equal to the center distance, it prints a warning that the solution is not feasible.