After designing this line follower robot using arduino uno, I have developed this computer controlled robot. It can be controlled via the computer and we can use specific keyboard keys to move it. It runs over serial communication which we have already discussed in our previous project – PC Controlled Home Automation.
Components Required
- Arduino UNO
- DC Motor
- Laptop
- Motor Driver L293D
- 9 Volt Battery
- Battery Connector
- USB cable
- Robot Chasis
Concepts and Details
We can divide this PC controlled robot circuit into different segments and they are – sensor section, control section and driver section. Let us see them separately.
Command or PC section: This section has a serial communication device like PC, laptop etc. Here in this project we have used a laptop for demonstration. We sends command to arduino by typing a character on hyper terminal or any other serial terminal like hyper terminal, Hercules, putty, arduino’s serial terminal etc.
Control Section: Arduino UNO is used for controlling whole the process of robot. Arduino reads commands sent by laptop and compare with defined characters or commands. If commands are matched, arduino sends appropriate command to driver section.
Driver section: driver section consists a L293D motor driver IC and two DC motors. Motor driver is used for driving motors because arduino does not supply enough voltage and current to motor. So we add a motor driver circuit to get enough voltage and current for motor. By collecting commands from arduino, motor driver drives motors according to commands.
Working
We have programmed the PC controlled robot to run by some commands that are send via serial communication to arduino from PC. (see programming section below)
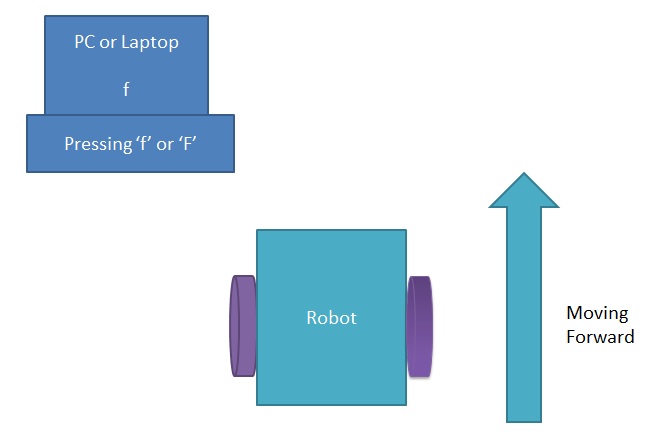
When we press ‘f’ or ‘F’, robot start to move forward and moving continues until next command is given.
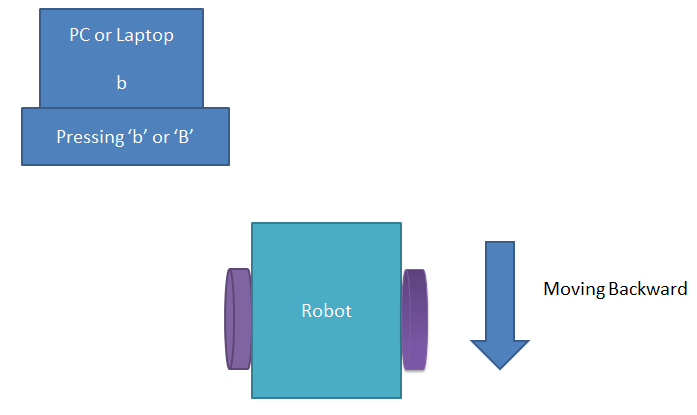
When we press ‘b’ or ‘B’, robot change his state and start moving in backward direction until any other command is given.
When we press ‘l’ or ‘L’, Robot gets turn left until the next command.
When we press ‘r” or ‘R’ robot turns to right.
Read More: Contrôlé par ordinateur Robot à l'aide d'Arduino