Our project consists of a vehicle designed to avoid collisions with objects and walls. The vehicle achieves this through the use of an onboard sensor to determine when such an object was close by.

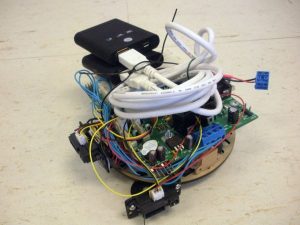
After recognizing an object within a certain distance the vehicle would then follow a series of parameters to determine the appropriate action to take in order to avoiding colliding with the object. We further designed our robot to use another onboard sensor to keep a close proximity with a wall or object as it resumed it’s anti-collision parameters.
Read More Detail :Anti-Collision (Mur De Câlins) Robot