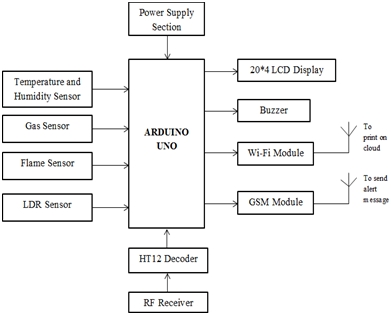
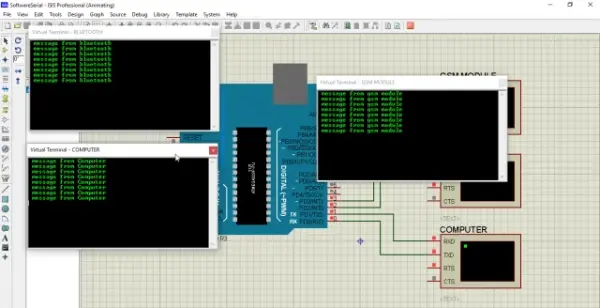
Significance Addresses critical safety concerns in mining which is inherently hazardous work Leverages IoT and Arduino to develop a comprehensive safety monitoring system Has potential to significantly reduce accidents and improve standards if implemented widely Methodology Utilizes various sensors to monitor environmental parameters like temperature, gas levels etc Interfaces sensors with Arduino microcontrollers for centralized […]