R.O.V.E.R. is an autonomous robot. He was built and designed as an interactive art installation specifically for the MAT EoYS 2013. He navigates the space with a heat array and bump sensors and interacts with attendees. When R.O.V.E.R. recognizes that a person is present he plays a song. If people are still visible and how much they are smiling effects whether he thinks they like the song, and he tries the next song.
A genetic algorithm is run with the songs and people’s reactions to create the most likable song. The heat sensor data, space and people he interacts with was mapped in processing and visualized in the space. The installation consisted of the robot exploring the space and a monitor with the visualization. This project explores Human Robotic Interaction, Computer Vision, Physical Computing, Interactive Environments, Bio-mimicry, and Genetic Learning Algorithms.
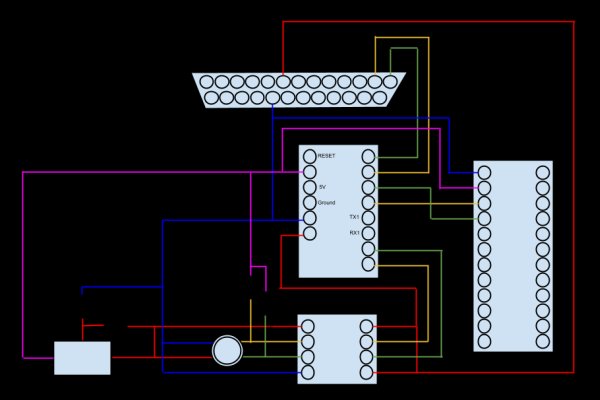
Goals: The minimal required outcome was the Arduino sending heat data to a off board computer via xBee, the Arduino would direct the wheels using the heat data, and there would be a visualization with face tracking, eigen data and the amount people are smiling. The reach goal was a mapping visualization of the space. All of these goals were reached though the real time face tracking visualization was deemed not interesting enough to be shown in the end of the year show.Goals: The minimal required outcome was the Arduino sending heat data to a off board computer via xBee, the Arduino would direct the wheels using the heat data, and there would be a visualization with face tracking, eigen data and the amount people are smiling. The reach goal was a mapping visualization of the space. All of these goals were reached though the real time face tracking visualization was deemed not interesting enough to be shown in the end of the year show.
Visualization Design: The visualization takes the last 3000 points and maps it. For each point there is the 64 bit temperature sensor array displayed. The left and right wheel velocities were converted to a trajectory, based off of time between each data point. If a face is seen at that point a circle is drawn next to the heat grid. The circle’s radius is based off of how many faces were visible. In the upper left corner is a larger realtime grid of the last heat sensor data received, and a red circle next to it if a face was seen. The visualization is updated each frame with the newest data.
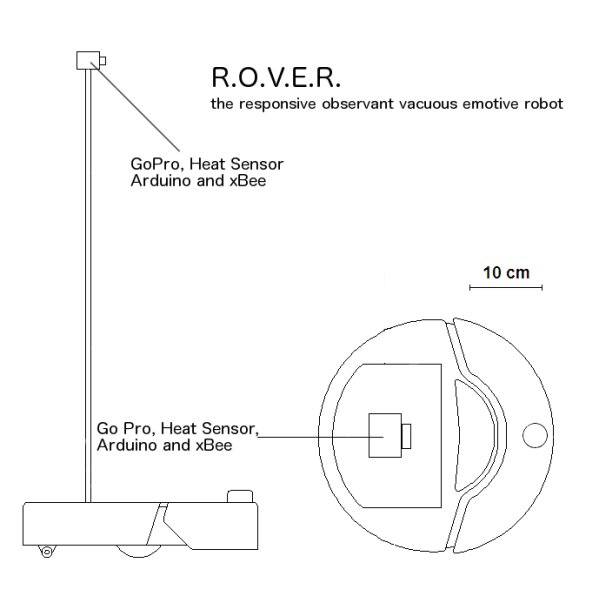
R.O.V.E.R. Design: R.O.V.E.R. was inspired by the loneliness and emptiness of the hallways of Elings Hall and the need for companionship. R.O.V.E.R.’s also came from the idea of Pavlov’s dog which learns via classical conditioning. I viewed R.O.V.E.R. to be like a puppy or alien trying to learn how to interact and communicate with people, due to this I chose to sew a furry felt covering. Many attendees of the show wanted to pet and touch R.O.V.E.R. for this reason.
For more detail: R.O.V.E.R.: Reactive Observant Vacuous Emotive Robot