Ollie is an open source blimp-based autonomous and ambient robot that dwells in human habitats. Ollie is observant, often flying in a manner suggesting curiosity for the world around him. Ollie reacts to voices by excitedly flapping his wings, communicating his friendliness and eagerness to be noticed. Ollie wants to know about humans and yearns for their attention.

Ollie is available to DIYers, hobbyists, artists, designers and students under the Creative Commons Attribution-ShareAlike 3.0 Unported License.
Ollie has an Arduino brain, wings to fly and a microphone to listen. In this instructable I will teach you how to make Ollie so you can meet him too. Please contribute suggestions, experiments, tweaks, hacks and discoveries of your own process here and comment on www.meandollie.com. Thank you!
Step 1: Parts list
The main parts needed are :
* 1 Arduino Pro Mini 328 – 5V/16 Mhz
* 1 FTDI cable or breakout board to charge Arduino Pro Mini
* 1 Electret Microphone
* 1 Polymer Lithium Ion Battery 850 – 900 mAh
* 2 Blue Arrow 3.6 Gram Micro Servos
* 1 36″ Mylar balloon envelope
* 1 30 guage wire/ wire-wrapping wire in 2-3 colors
* 1 LED
* 1 Sheet of Mylar or foil for wings
* 1 Spool of sculpture wire for wings
* 1 Helium tank or access to a party store
* 1 Switch
* 1 3.9 KΩ resistor
* 1 4.7 KΩ resistor
Additional items
* Arduino Uno or other (for testing)
* Breadboard
* 22 or 24 guage wire
* Lightweight tape
* Small weighing scale
* Soldering iron and solder
* Quick-setting Epoxy
* Glue gun
* Playdoh or clay
* Small cups
* Cutter
* Wire stripper
* Wire wrapping tool
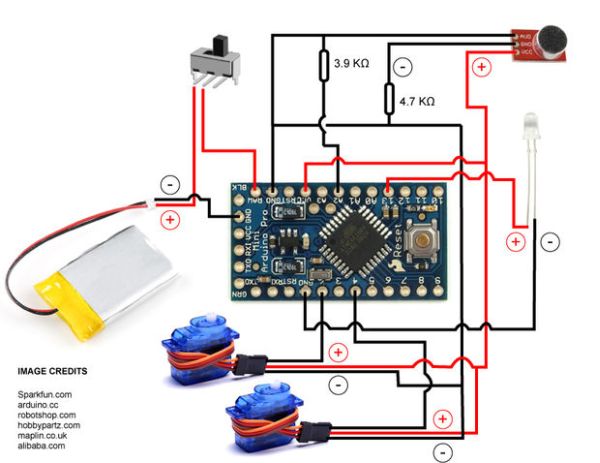
Step 2: Circuit
Step 3: Making the Wings
Bend sculpture wire to create 2 identical wing shapes. Try to conserve amount of wire used to minimize weight. Use epoxy to secure the ends.
Attach servo accessory to the ends of the wings keeping check of orientation and secure with epoxy. Secure with small pieces of tape if necessary.
Cut out identical pieces of Mylar or foil and attach to wire shapes using a glue gun. Leave the foil loose when attaching so it takes a hemispherical shape when wing is flapped.
Attach wings to the servo.
Wire up the servos using wire-wrapping wire.
Step 4: Wiring up the servo
Plug the control wires from the servos to digital pins 2 and 4 and connect to 5V power and ground on a breadboard and/or Arduino Uno (for testing)
Upload a basic servo program to check wiring making sure that both wings exhibit identical motion.
If wings are not moving check continuity in circuit, secure connections and try again. If circuit works, disconnect and prepare wiring for Arduino Mini Pro.
Insert servos through 2 small identical plastic cups and glue to secure in place. Make sure wings move without any obstructions. Cups are useful in attaching wings to the balloon and hiding wires.
Step 5: Attaching wings to blimp
Mark points on the empty 36″ blimp envelope where wings will be mounted. Points should be in exactly opposite on the balloon surface and provide balance to the blimp.
Cover the cups with Mylar foil using glue gun.
Fill up 36″ Mylar envelope with Helium.
Attach servo cups to the balloon using small pieces of tape. Let wires hang loose.
Cover the tape with pieces of Mylar or foil. Silver metal tape can also be used.
For more detail: Ollie- a DIY autonomous robotic blimp