Build this autonomous driving robot car based on a old RC toy car. I removed the radio control board from the car and replaced it with a brain in the form of an Arduino UNO board (plus a motor driver board) and gave it an ultrasonic distance measuring module to see the world through.

Step 1: Components
- Radio controlled toy car
- Arduino Uno
- Motor driver board (2 channel)
- Ultrasonic sensor distance measuring module
- Bread board
Step 2: Brain transplant
Remove the radio control board from the RC car cutting all wires close to the board. Connect wires to the motor driver board – rear wheel motor in one channel – front wheel steering motor in the other channel.
“Steal” power from the cars batteries.
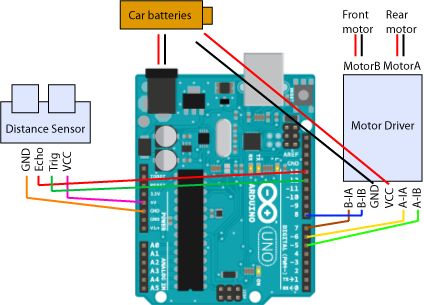
Step 3: Connect Arduino board and the ultrasonic sensor
Connect the ultrasonic sensor and the motor driver to the Arduino board.
Step 4: The programming
The cars intelligence is pretty simple. It’s based on different modes that controles speed & direction depending on distance to objects ahead of the car:
FULL SPEED MODE – No objects ahead – full speed
CRUISE MODE – Object is X cm away – slow down
AVOID MODE – Object is too close for comfort – slow down and turn in random direction
REVERSE MODE – Object is very close – stop and reverse for 2 seconds