Arduino Quadruped Robot – Stalker
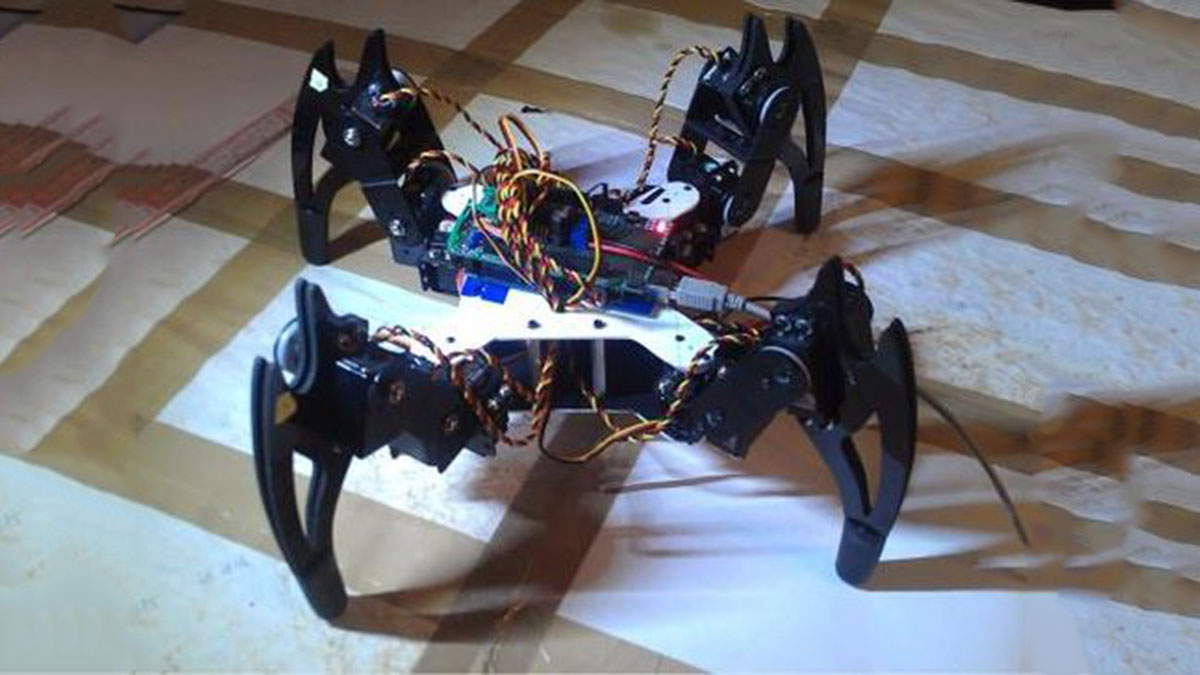
I am going to build an Arduino Quadruped Robot. As usual, I will share my source code and show as many pictures as possible, to help those of you who are also building Quadruped robots. The way I do things might not be the best ways, and I am sure you can come up with better solutions, please let me know if you do!
This robot is actually the first robot I wanted to build, but I failed miserably. you can check this out and this. After building a working Arduino Hexapod robot, I feel confident that I can pull it off this time! I recycled the parts from the arduino hexapod robot, and build a body with styrene sheets, so there is no new parts.
For Inverse Kinematics, Check out my tutorial:
http://blog.oscarliang.net/inverse-kinematics-and-trigonometry-basics/
I made an excel spreadsheet to simulate the movements of a quadruped robot. It shows detailed inverse kinematics calculations, and it might help those who are having problem understanding IK to visualize the complex computations, also it’s a great help to debug your code.
Download Quadruped Robot Simulation Spreadsheet V1.0
Hardware that I use at the moment:
1. Arduino Mega
2. 12 Servos
3. Wii Nunchuck controller
5. a few thick styrene sheets (skeleton)
6. 6V Ni-MH 4300mh Battery
Plan:
============================================================
Project Started – Update 31/03/2013
Basically copied most of the codes from my last Hexapod robot. All I did was to remove the variables related to the middle legs, and modifed the preset variable values to work in the Quadruped Robot, and it actually worked! ![]()
But the movements are quite Awkward, a lot of work need to be done about Inverse Kinamatics.
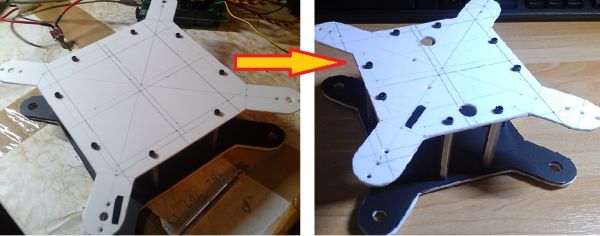
Here is how I made the body:
[box color=”#985D00″ bg=”#FFF8CB” font=”verdana” fontsize=”14 ” radius=”20 ” border=”#985D12″ float=”right” head=”Major Components in Project” headbg=”#FFEB70″ headcolor=”#985D00″]1. Arduino Mega
2. 12 Servos
3. Wii Nunchuck controller[/box]
For more detail: Arduino Quadruped Robot Stalker